
Given the algorithms to be executed on each BoWI node, the objective is here to design an ultra-low power architecture for a WBSN that consumes an average power of 200 µW, bounded by the expected energy that can be harvested in the context of a WBSN. This is an on-going work that is based on the following principles:
- Dedicated Control (FSM) and Processing Units (to be shared by some tasks when relevant).
- Reconfigurable architecture: no instruction decoding and optimized data locality.
- Ultra-low power by aggressive use of dynamic power management: every time step, unused control, storage, and processing units are switched off.
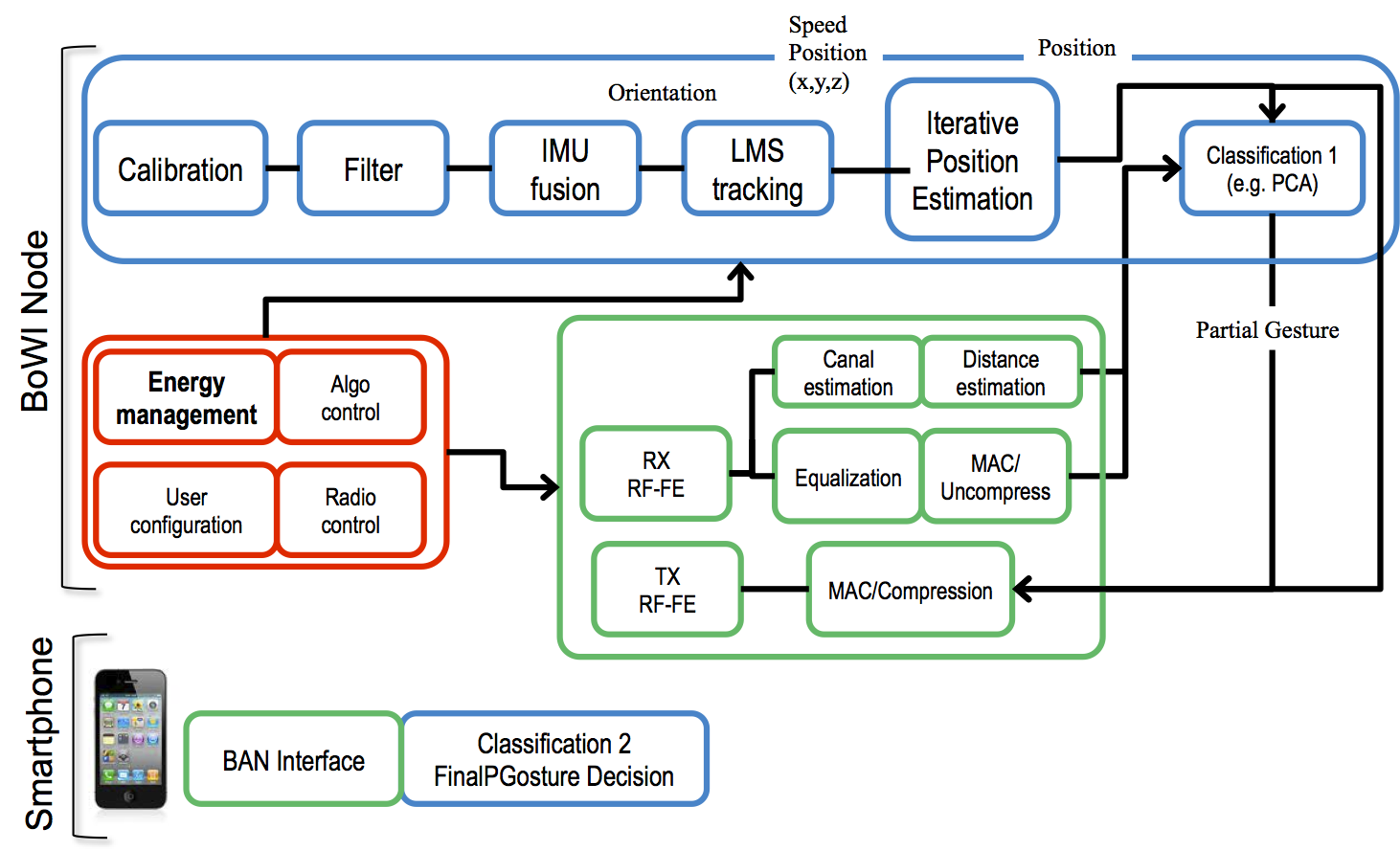
Figure 1: BoWI node architecture synoptic.
A first study based on simulation gave us a primary idea of the energy budget repartition. The result of Figure 2 shows that sensors only can consume the bulk of the energy budget in the active mode. This leads to the need of a configurable architecture where only used resource are activated and where a dynamic controller would adapt the configuration of the node according to application requirements.
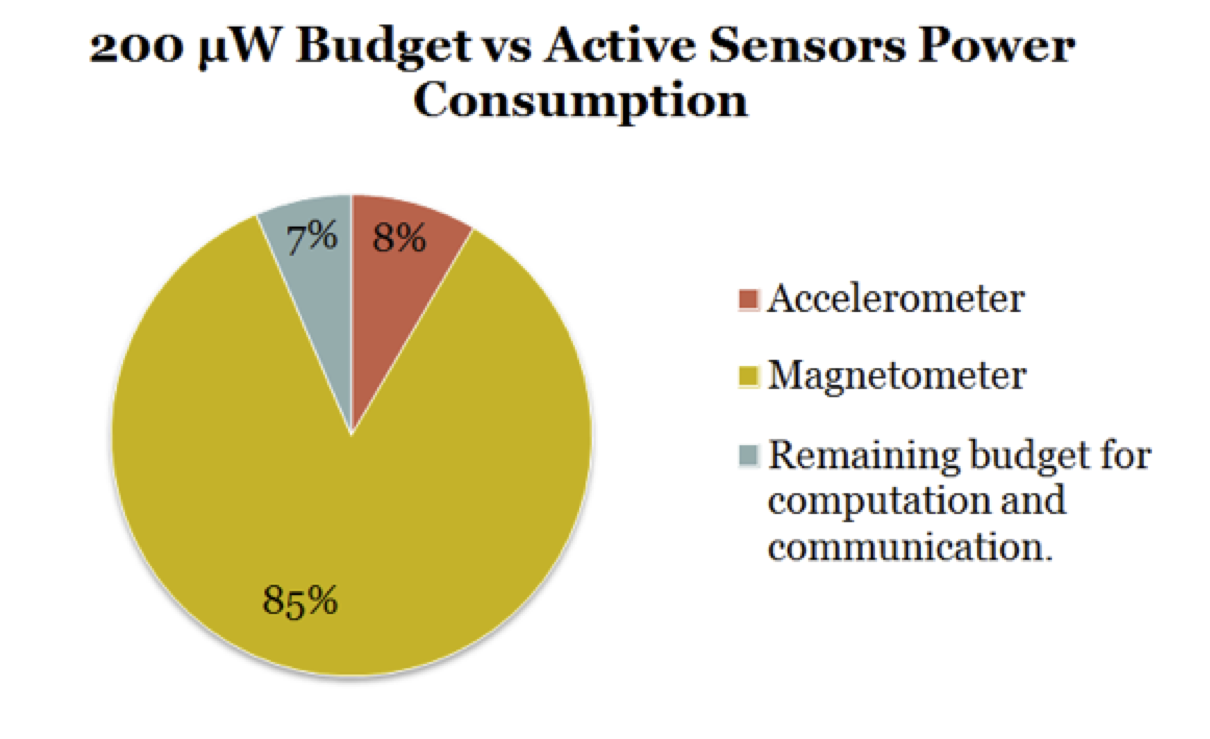
Figure 2: Power budget of the sensor node.
To reach such ultra-low power goal, considering a specialized architecture is a must. Aggressive power saving techniques, based on optimized dedicated functional units combined with power gating and DVFS control, are employed to increase energy efficiency significantly. The main feature of our proposal is that computation and communications needs are driven by user motion.
We designed the architecture as a computation part driven by a hierarchical FSM (see Figure 3). The top FSM is reduced to a minimal FSM that handles high-level signal as motion detection and computation needs. This approach is possible due to the relative slowness of the human motion compared to sensors and wake-up time of the whole system.
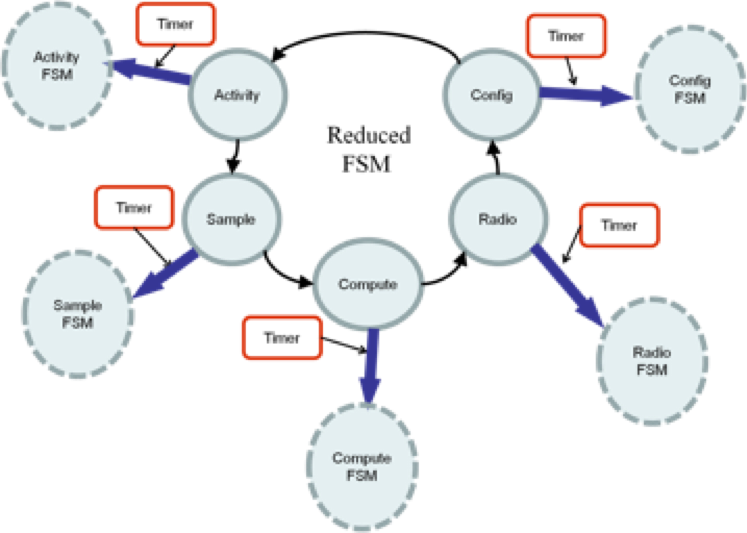
Figure 3: A hierarchical FSM as the main controller.