Opération au titre de l’année : 2015
Titre : Robot à câbles
Site(s) : CRAN–LORIA
Porteur(s) : Dominique Martinez (LORIA, DR CNRS), Mohamed Boutayeb (CRAN, PR Université de Lorraine)
Financement : 120 k€
Contexte, présentation générale de l’opération et objectifs recherchés
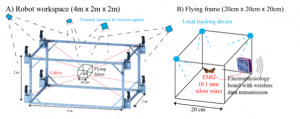
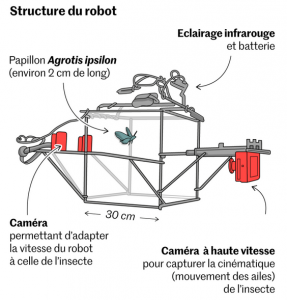
Notre projet de recherche dans le CPER s’inscrit dans le cadre d’une collaboration entre le CRAN et le LORIA. Il s’agit de réaliser un système robotisé afin d’étudier le comportement des insectes en vol libre, à travers des systèmes d’enregistrements électrophysiologiques embarqués. Dans ce but, nous proposons une approche unique où un robot à câbles est développé pour enregistrer des signaux biologiques (muscles alaires) et suivre des insectes en vol libre. Cette classe particulière de robots dits parallèles où les liaisons rigides sont remplacées par des câbles flexibles est souvent utilisée pour déplacer de lourdes charges à basse vitesse (exemple : plateforme INCA 6D au laboratoire ICube). A l’inverse, notre application de suivi d’insecte en vol libre nécessite une dynamique très rapide (vitesse et accélération supérieures à 1 m/s et 1 g) et une extrême précision. Ce projet de recherche qui consiste à concevoir et mettre en œuvre un robot à câbles à dynamique rapide et à très grande précision s’inscrit totalement dans les objectifs de l’usine du futur car plusieurs applications industrielles sont envisageables, en particulier la prise de pièces ultra-rapide, l’assemblage et l’usinage de haute précision afin d’augmenter la qualité et la productivité. Les défis à relever sont (1) le développement d’un modèle mathématique du robot en considérant les frottements secs et les inévitables retards liés au temps de calcul et aux transmissions, (2) le développement de lois de commande pour un système sur-actionné à 8 moteurs en tenant compte des contraintes sur la tension des câbles et des trajectoires inconnues, (3) la construction du robot et sa validation expérimentale sur le suivi d’insecte en vol libre.
CV du ou des porteurs de l’opération
Dominique MARTINEZ est docteur en électronique de l’Université Paul Sabatier, Toulouse, France. Sa thèse réalisée au Laboratoire d’Automatique et d’Analyse des Systèmes (LAAS–CNRS) est intitulée « Building and learning methods for multilayer neural networks ». Il est Directeur de Recherche CNRS au Laboratoire Lorrain de Recherche en Informatique et ses Applications (LORIA) à Nancy. Ses activités de recherche portent sur plusieurs thèmes: Computational modelling and numerical simulation, Biosensing and biorobotics, Machine Learning. Il a notamment porté ou participé des projets pour plus d’un million d’euros sur les dix dernières années. Il est auteur ou co-auteur de 42 articles de journaux et 84 articles de conférence.
Mohamed BOUTAYEB est docteur de l’Université de Lorraine depuis 1992 et habilité à diriger les recherches depuis 2000 de la même université. Il est actuellement professeur des universités de l’Université de Lorraine, et membre du Centre de Recherche en Automatique de Nancy, après avoir été professeur des universités à l’Université de Strasbourg de 2002 à 2007. Ses activités de recherche portent principalement sur la théorie du contrôle et de l’estimation des systèmes dynamiques. Il est auteur de 57 articles en revues internationales et de plus de 130 articles de conférence. Il est responsable scientifique de plusieurs projets ANR et avec la DGA.
Plusieurs articles et vidéos associés la plateforme
Plusieurs articles et vidéos sont associés à la plateforme et l’article suivant:
Rémi PANNEQUIN, Melanie JOUAITI, Mohamed BOUTAYEB, Philippe LUCAS et Dominique MARTINEZ : Automatic tracking of freeflying insects using a cable-driven robot. Science Robotics, 5(43):eabb2890, juin 2020.
http://www.cnrs.fr/CNRS-Hebdo/IdF-sud/lettre.php?numero=547
https://twitter.com/RFI/status/1271682461521653765
https://techxplore.com/news/2020-06-robot-track-insects.html
https://www.hackster.io/news/cnrs-researchers-design-a-robot-to-track-andfilm-flying-insects-993640ab3d8a
https://cosmosmagazine.com/uncategorized/spiderlab-films-some-free-flying-specimens/
https://newatlas.com/good-thinking/lab-on-cables-insect-tracking-camera/
https://interestingengineering.com/scientists-develop-first-cable-driven-robot-that-can-keep-up-withfree-flying-insects
http://factuel.univ-lorraine.fr/node/14496
https://www.irobotnews.com/news/articleView.html?idxno=21048
https://techable.jp/archives/127869
http://www.rfi.fr/fr/podcasts/20200614-robot%C3%A9tudier-les-insectes-volants
https://www.youtube.com/watch?v=bBOqnSICPg4
https://www.youtube.com/watch?v=I-NLYMEqV1w
Galerie