- Hugo Le Blevec, Mathieu Léonardon, Hugo Tessier, Matthieu Arzel. Pipelined Architecture for a Semantic Segmentation Neural Network on FPGA. ICECS 2023: IEEE 30th International Conference on Electronics, Circuits and Systems, Dec 2023, Istanbul, Turkey. ⟨10.1109/ICECS58634.2023.10382715⟩. ⟨hal-04262138v2⟩
- Ismail Amessegher, Hajer Fradi, Clémence Liard, Jean-Philippe Diguet, Panagiotis Papadakis, Matthieu Arzel. Simulating Aerial Event-based Environment: Application to Car Detection. European Robotics Forum 2024, Mar 2024, Rimini, Italy. ⟨hal-04497648⟩
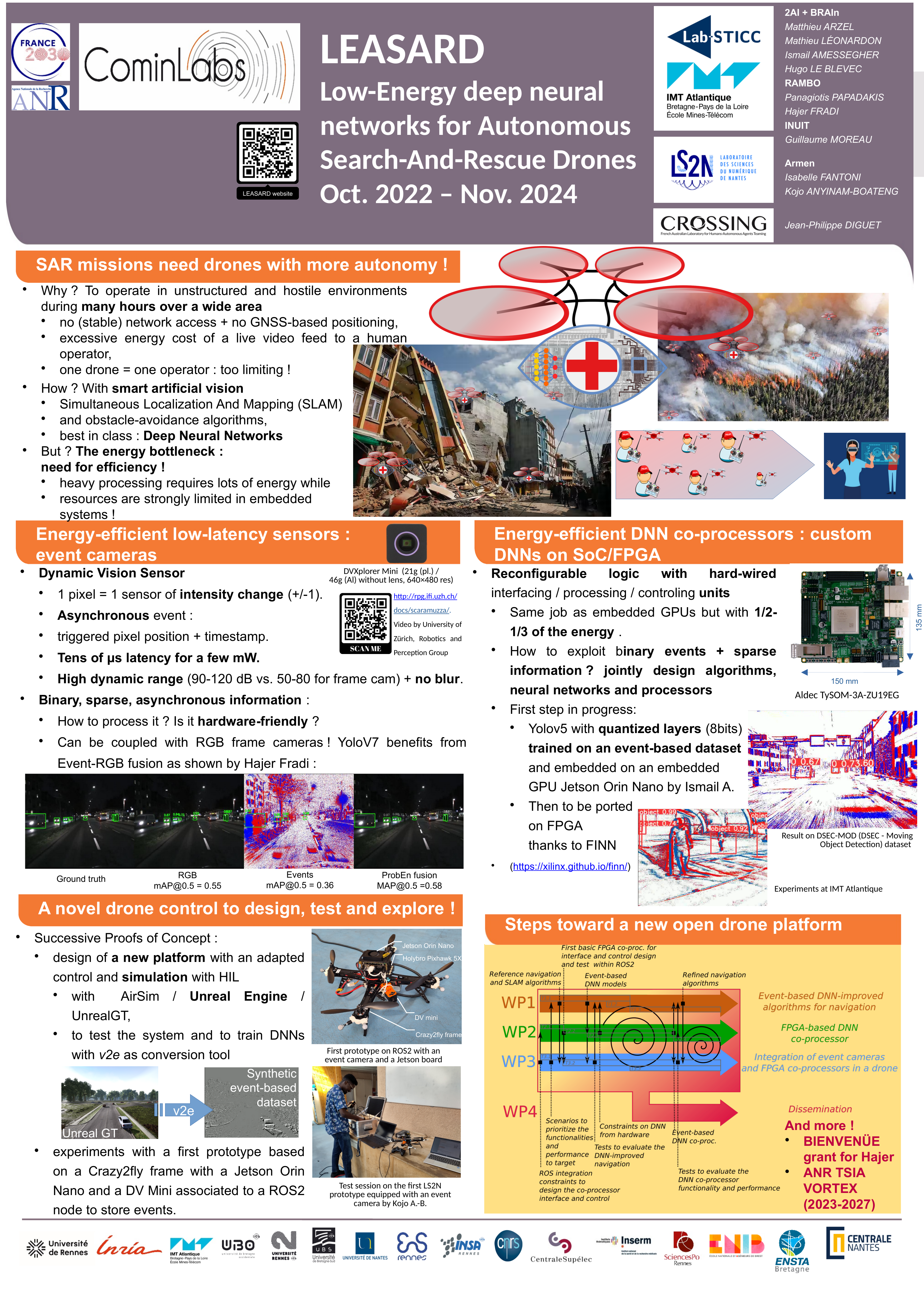
- Hajer Fradi, Panagiotis Papadakis. Advancing Object Detection for Autonomous Vehicles via General Purpose Event-RGB Fusion. In 2024 Eighth IEEE International Conference on Robotic Computing (IRC) (pp. 147-153). IEEE. ⟨hal-04746439⟩
- Ismail Amessegher, Arthur Gaudard, Kojo Nyamekye Anyinam-Boateng, Hugo Le Blevec, Lionel Génevé, Florian Pouthier, Mathieu Léonardon, Hajer Fradi, Lucia Bergantin, Panagiotis Papadakis, Isabelle Fantoni, Jean-Philippe Diguet, and Matthieu Arzel. Towards Low-Latency Object Detection on Board Reactive Search-and-Rescue Drones. IEEE International Symposium on Safety, Security, and Rescue Robotics (SSRR), Oct 2025, Galway, Ireland. ⟨hal-05280264⟩
- Ala Souissi, Hajer Fradi, and Panagiotis Papadakis. 2025. Towards Event-Driven, End-to-End UAV Tracking Using Deep Reinforcement Learning. In Proceedings of the 3rd International Workshop on UAVs in Multimedia: Capturing the World from a New Perspective (UAVM ’25). Association for Computing Machinery, New York, NY, USA, 52–56. https://doi.org/10.1145/3728482.3757384