Contexte et motivations
La commande des robots humanoı̈des est un des axes de recherche d’Inria Nancy – Grand Est / LORIA, notamment dans l’équipe LARSEN. La principale force des robots humanoı̈des est leur polyvalence : puisque leur forme est similaire à celle d’un humain, ils peuvent théoriquement réaliser tout ce que fait un humain ; par exemple, marcher, monter sur un obstacle, ouvrir un placard en hauteur, monter sur un escabeau, etc. Cette polyvalence implique cependant une complexité importante car il faut synchroniser à chaque instant de très nombreux degrés de liberté (20 à 30 moteurs) pour ne pas perdre l’équilibre.
Pour tirer pleinement parti de ces robots, l’équipe est pour l’instant concentrée sur la téléoperation « corps complet ». Dans ce scénario, un opérateur porte une combinaison de capture de mouvement (basée sur des capteurs inertiels ou des caméras externes) et le robot reproduit ses mouvements sur un site distant. Il ne s’agit pas de simplement recopier les positions des actionneurs car l’humain et le robot ont des degrés de liberté différents, une dynamique différente et généralement une taille différente ; en pratique, la position du robot doit être recalculée à haute fréquence (1000 Hz) pour que ses mains suivent la trajectoire de l’opérateur et le robot n’a pas la même position que l’humain.
Les applications possibles de ces technologies sont typiquement l’intervention sur des sites industriels très distants et sans présence humaine, comme, par exemple, des stations de forage dans l’océan ou des datacenters dans des lieux froids. Les autres applications typiques sont les interventions en milieu dangereux pour un humain (contamination biologique, chimique ou radioactive) dans le cadre industriel ou post-catastrophe.
L’équipe a obtenu des résultats prometteurs sur le robot humanoı̈de iCub (Penco et al. 2018 ; Penco et al. 2019 ; Penco et al. 2020) [lien video]. Néanmoins, ce robot a des proportions d’un enfant (1.04m), ne peut pas porter de charges de plus de quelques centaines de grammes, est fragile et ne fonctionne pas sur batterie. Cela en fait une plateforme très loin des applications potentielles. L’objectif de cet investissement est d’acquérir un robot humanoı̈de plus proche des applications : plus grand, capable de porter des charges et plus robuste pour le téléopérer en corps complet. Cet investissement permettra de développer et tester de nouveaux algorithmes de commande et de téléoperation.
Cet investissement s’inscrit dans le prolongement du projet ERC ResiBots (Mai 2015 – Oct. 2020), qui vise à utiliser l’apprentissage automatique pour permettre aux robots de résister aux pannes et au projet européen H2020 AnDy (2017-2020), qui s’intéresse à l’interaction homme-robot, notamment dans le contexte industriel. Il s’appuie donc sur l’infrastructure expérimentale et logicielle développée dans ces projets : capture du mouvement, espaces expérimentaux et commande corps complet du robot humanoı̈de iCub.
Description de l’investissement réalisé
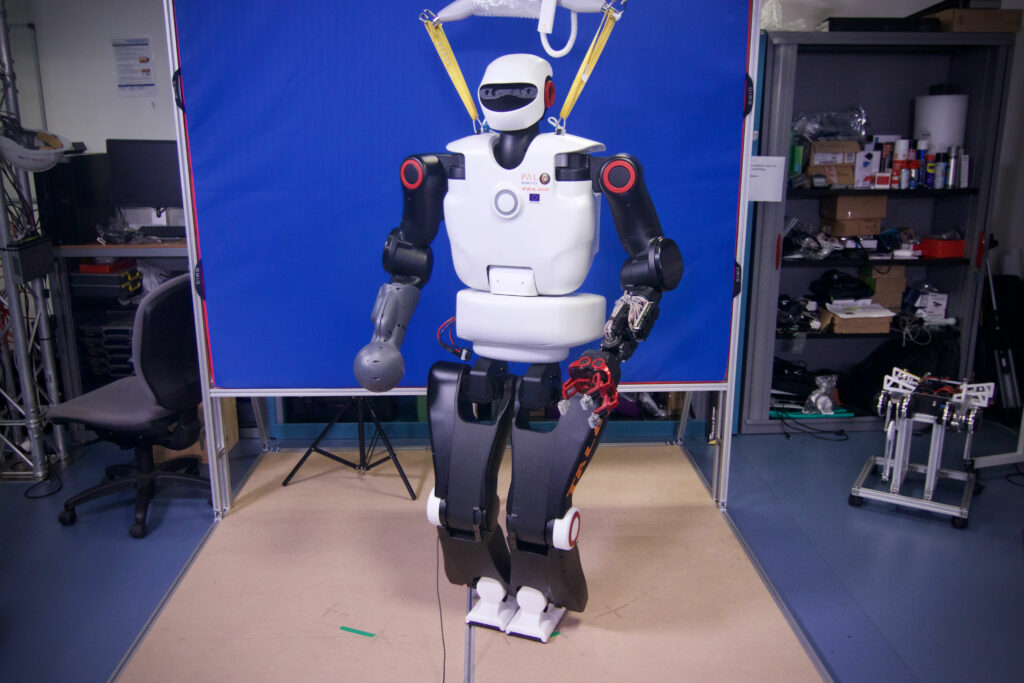
Montant : 620 000 €
Fournisseur : PAL Robotics (Espagne)
Type de matériel : robot humanoı̈de
32 degrés de liberté
95 kg
175 cm
charge utile : au moins 6 kg par bras
batterie de 1080 Wh / 100A (1.5 heure d’autonomie)
4 capteurs de force/couple (chevilles et poignets)
capteurs de couple dans toutes articulations sauf la tête, les mains et le poignet
Calendrier
Janvier 2019 : préparation de la procédure et rédaction du cahier des charges
Mars 2019 : projet de marché (procédure concurentielle avec négociation)
27 mars 2019 : appel à candidature
13 mai 2019 : ouverture des offres reçues (une seule offre)
27 mai 2019 : début des négociations
8 juillet 2019 : réception de l’offre de PAL Robotics
23 juillet 2019 : acte d’engagement (numéro 2019-00320)
5 décembre 2019 : réception du matériel au laboratoire
9-11 décembre 2019 : formation de l’équipe organisée par PAL Robotics
Utilisation
L’équipe combine l’apprentissage automatique (machine learning) et la commande corps-complet pour permettre une téléoperation corps-complet la plus naturelle et la plus robuste possible. Quelques exemples de projets en cours :
- Projet «Humanoı̈de résilient» (financement DGA, 3 ans + thèse) : utiliser de l’apprentissage automatique pour permettre au robot d’adapter son modèle à des dommages et des situations non prévues, par exemple la perte d’un bras ou l’ajout d’un capteur sur la tête. Ce projet continue l’ERC ResiBots (Cully et al. 2015).
- Projet « wbTorque » (financement Inria, 2 ans) : implémentation d’un contrôleur corps-complet qui exploite les capteurs de couple du robot pour augmenter la sécurité et l’interaction.
- Optimisation des poids et des tâches du robot par optimisation stochastique : la commande du robot est organisée sous forme de tâches correspondant à maintenir l’équilibre, suivre une trajectoire avec la main, etc. Dans ces travaux, nous cherchons à simplifier la mise au point du contrôleur en optimisant automatiquement tous les paramètres. Ce projet continue les résultats obtenus avec iCub (Penco et al. 2020) dans le cadre du projet AnDy.
- Gestion des déconnexions et des retards : si la connexion n’est pas robuste, le robot peut apprendre des mouvements passés l’intention de l’opérateur et continuer le mouvement initié malgré l’absence de connexion. Ce projet s’appuie sur les Probabilistic Movement Primitives (Paraschos et al. 2013) et s’appuie sur le projet AnDy.
- Téléoperation basée sur l’indice de manipulabilité : recopier les possibilités offertes par la posture humaine (dans quelle direction le mouvement peut aller le plus vite) pour les reproduire sur le robot afin d’anticiper les mouvements de l’humain.
Le confinement (sans accès au laboratoire) et la complexité de plateforme ont retardé la publications de résultats avec le nouveau robot, mais ces différents projets ont déjà des résultats prometteurs.
Galerie