

The model order reduction method used in this plugin is based on the projection of state variables onto an attractive subspace of small dimension:
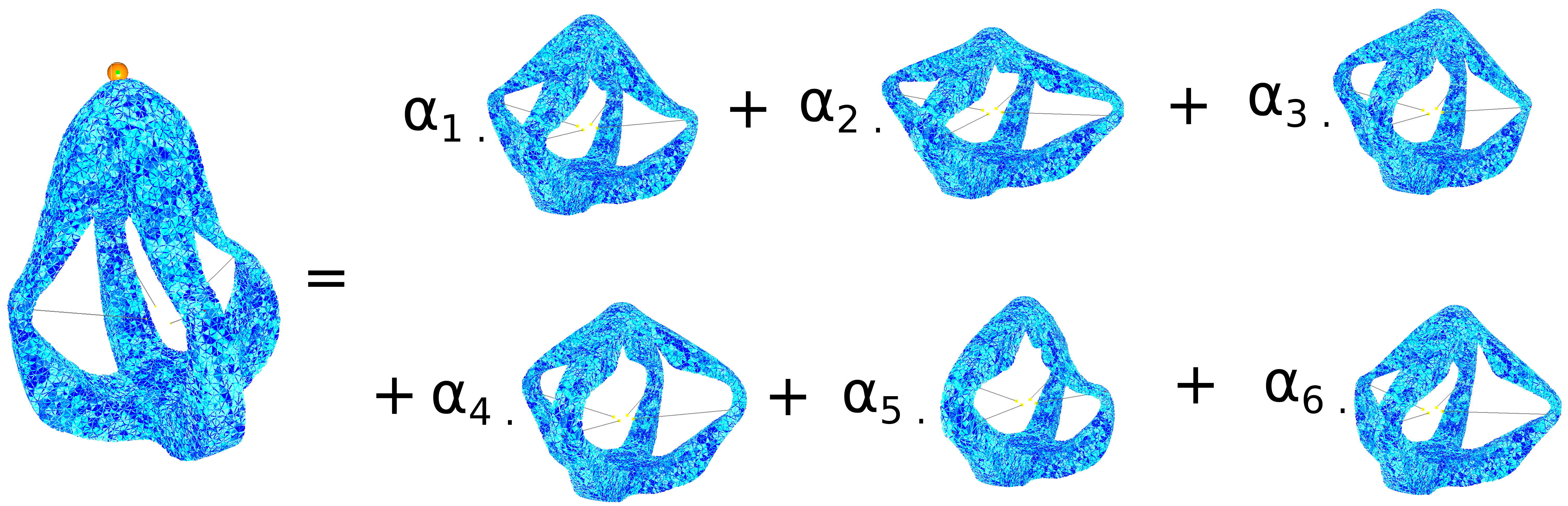
The deformation of the simulated object is expressed as a linear combination of precomputed basis vectors
This basis is pre-computed in an offline phase by taking snapshots of the object deformed in all its possible configurations and using the Proper Orthogonal Decomposition (POD) to keep the essence (the most relevant information) from these snapshots.
In a second phase, a method of hyper-reduction is used for computational speed-up. It consists in selecting only a small subset of elements on which the mechanics of the object will be computed:
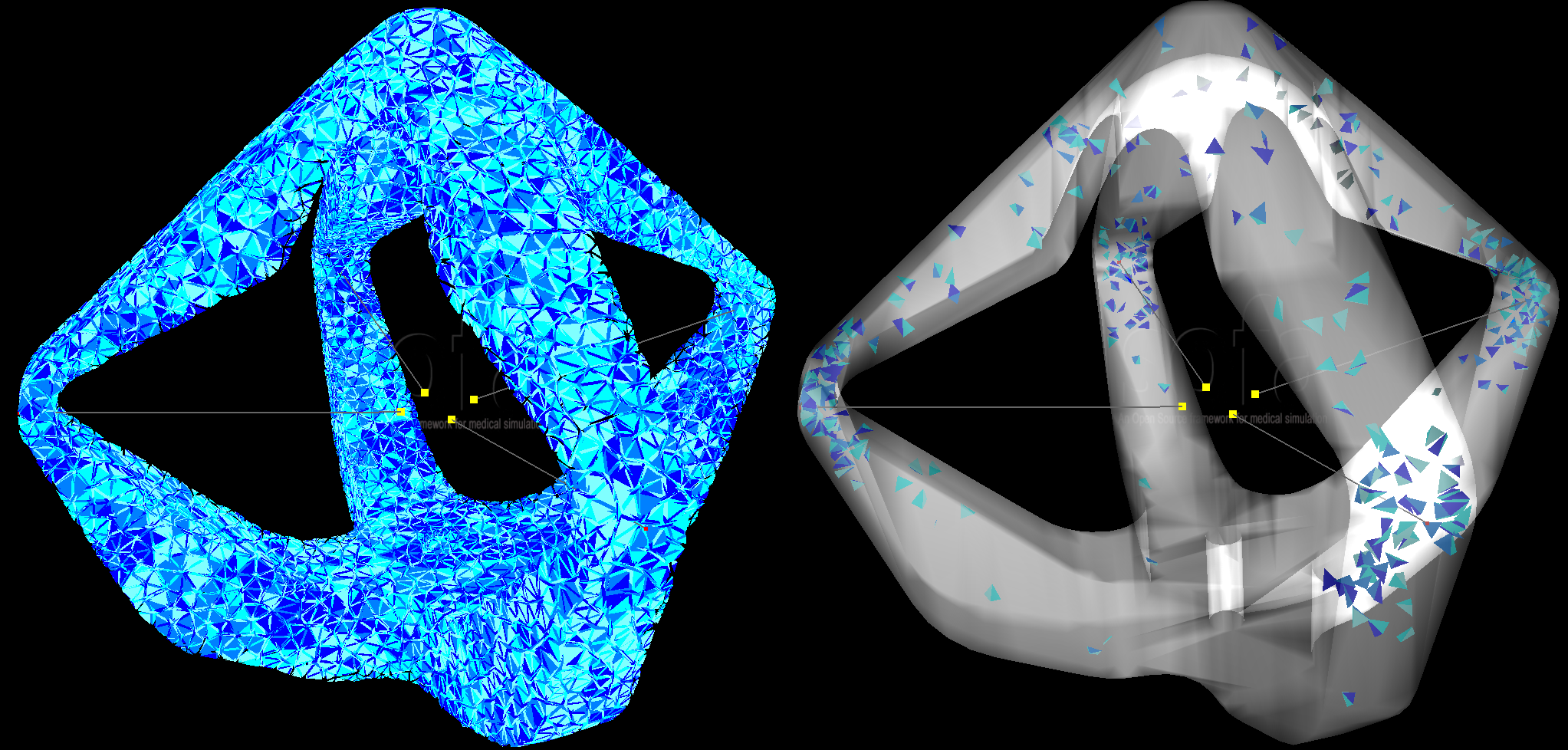
Fine discretisation of an object and its hyper-reduced surrogate
More details about the reduction method can be found in the context of soft robots in :
Fast, generic and reliable control and simulation of soft robots using model order reduction
O. Goury, C. Duriez, IEEE Transactions on Robotics, 2018