



Save computational time
Link to github page :
https://github.com/SofaDefrost/ModelOrderReduction
Please don't hesitate to contribute !
Documentation
You can find it maintained here :
https://modelorderreduction.readthedocs.io
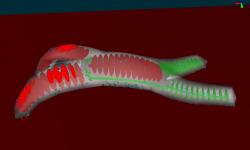
New example: revisited caduceus
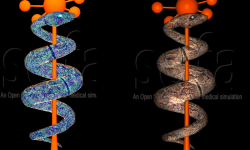
The SOFA default scene is revisited in a more accurate way using a more accurate mechanical model for the snake. That new version runs at low frame rate and we apply a reduction to achieve interactivity. Look at the reduced version in the doc/examples folder, or apply the reduction yourself…
HexahedronFEMForceField now available for Hyper-Reduction
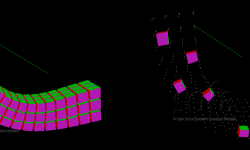
The plugin now includes reduction for HexahedronFEMForcefield. Look for the example “hexaBeam.pyscn” in the plugin folder.
Presentation of the MOR plugin at the SOFA week

The Model Order Reduction plugin will be presented during the SOFA week. General results using the plugin will be presented during the SOFA symposium. The plugin itself will be presented in the form of a tutorial during the SOFA plugin session.
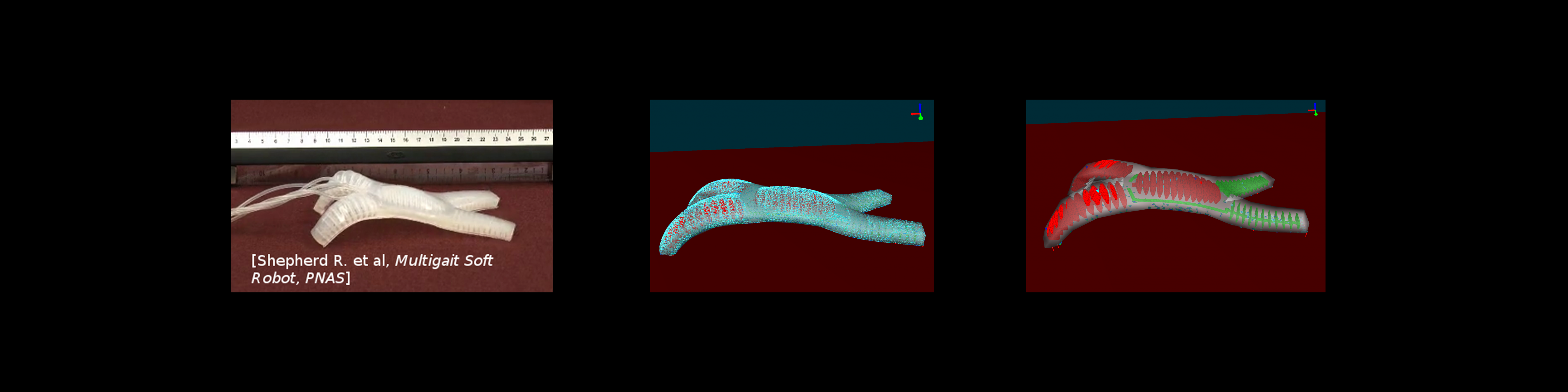
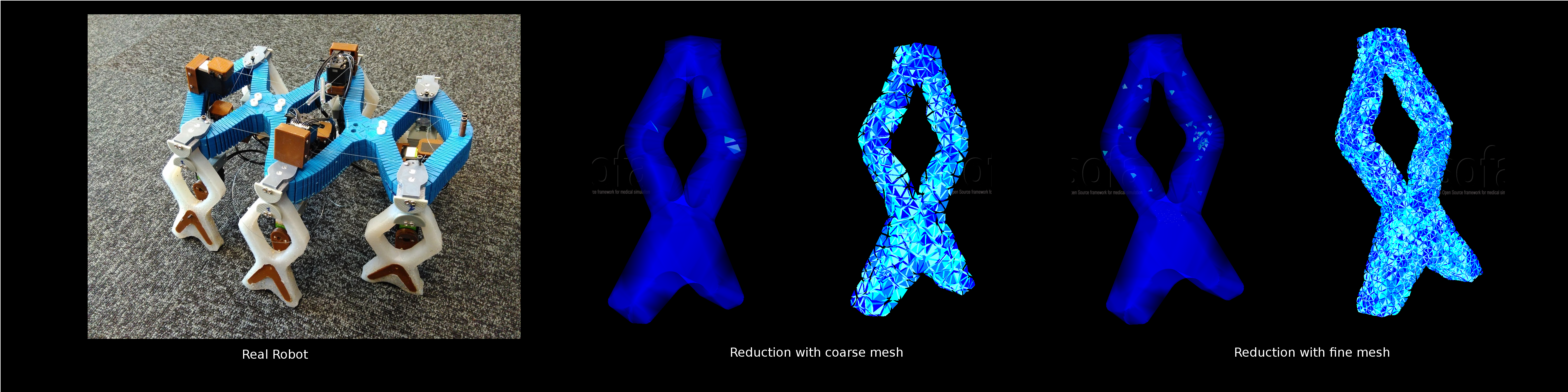
New paper accepted at IEEE Transactions on Robotics
Fast, generic and reliable control and simulation of soft robots using model order reduction Olivier Goury, Christian Duriez
Presentation at the European Conference on Computational Mechanics (ECCM-ECFD 2018)
Results obtained using the plugin were presented at ECCM-ECFD 2018 in a keynote talk: program link