New example: revisited caduceus
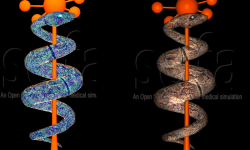
The SOFA default scene is revisited in a more accurate way using a more accurate mechanical model for the snake. That new version runs at low frame rate and we apply a reduction to achieve interactivity. Look at the reduced version in the doc/examples folder, or apply the reduction yourself…