
Clippée sur un déambulateur, un fauteuil roulant ou une canne blanche, Dornell est une poignée intelligente qui envoie de petites vibrations dans la main pour indiquer aux mal-voyants la direction à prendre ou la présence d’obstacles. Né de précédentes recherches en robotique au service de l’inclusion, ce projet fait actuellement l’objet d’un Défi Inria à la fois pour introduire de nouvelles technologies haptiques et pour mieux appréhender les problèmes scientifiques liés à la perception multisensorielle.

Un déambulateur expérimental encombre le couloir d’entrée du laboratoire. Il suffit de l’agripper et de fermer les yeux pour commencer à comprendre. Premiers pas dans le noir… Perte instantanée des repères. Encore quelques mètres et la poignée gauche se met à vibrer. Attention : on va bientôt heurter un mur. Petit virage donc pour corriger le cap et l’on repart. Malgré l’absence de référence visuelle, la navigation s’avère efficace. Et c’est au creux de la main que l’information circule…
“Quand on marche, le sens du toucher est le moins utilisé. Il se trouve donc disponible pour envoyer des informations à la personne qui déambule. D’où notre idée de générer des sensations sur la peau à l’aide petites vibrations pour guider les personnes en situation de handicap,” résume Marie Babel, co-responsable avec Claudio Pacchierotti du Défi Inria Dornell, une action de recherche transversale impliquant trois équipes de l’institut.
Enseignante-chercheuse à l’Insa de Rennes et membre de l’équipe de robotique Rainbow*, Marie Babel travaille de longue date sur l’aide à la navigation pour les fauteuils roulants. La nouvelle brique technologique vient apporter le retour haptique en complément des systèmes précédemment développés.
“L’idée est née durant une rencontre avec le chercheur Pascal Guitton, de l’équipe Potioc*, et un ingénieur lui-même atteint de cécité. Le dispositif prend la forme d’une poignée intelligente qui va se clipper sur le matériel existant. Ce que l’on appelle des aides techniques à la mobilité : le déambulateur, la canne blanche, la pré-canne pour les jeunes aveugles ou encore le fauteuil électrique.”
Le projet mobilise une vingtaine de chercheurs, doctorants, ingénieurs et techniciens. Les travaux impliquent la conception de plusieurs actuateurs. L’un des systèmes imaginés est un joystick pour le pilotage des fauteuils. Ce manche reçoit quatre petits moteurs. La vibration indique la direction à prendre : gauche, droite, avant, arrière. Le deuxième dispositif concerne la poignée pour cannes et déambulateurs. Sous de fines membranes de plastique au contact de la peau, une série d’aimants mobiles vient, là aussi, impulser de petites vibrations. Au passage, beaucoup de questions surgissent : sous quels doigts placer ces membranes ? Quelle force donner à la vibration ? Quelle fréquence ? Peut-on activer plusieurs membranes successivement comme pour indiquer une direction, un peu à la manière d’une flèche clignotante ?
Des problèmes liés à la perception
Nos recherches soulèvent ici des problèmes scientifiques liés à la perception. Que percevons nous ? Que comprenons-nous de ce que nous percevons ? Comment interprétons-nous les signaux ? Et à partir de là, comment choisir le meilleur signal pour une tâche de navigation particulière ? Exemple : faut-il privilégier un système qui vibre pour signaler un obstacle ou, au contraire, pour indiquer la direction à prendre ? Et peut-on mélanger ces modes de fonctionnement ?” Tout cela sans oublier que les utilisateurs éprouvent parfois aussi d’autres difficultés, qu’elles soient sensorimotrices ou cognitives.
“Sur ces aspects perception, nous avons pour partenaire académique l’Institut des systèmes intelligents et de robotique (Isir). Plus précisément, le chercheur David Gueorguiev avec qui mon collègue Claudio Pacchierotti travaillait déjà auparavant.” Les deux scientifiques co-dirigent actuellement une des thèses financées par le Défi Inria, avec Maud Marchal, enseignante-chercheuse à l’Insa.
Inclure l’utilisateur dans la boucle de commande
Mais le projet ne s’arrête pas là. “Dans notre travail en robotique, nous nous efforçons toujours d’inclure l’utilisateur dans la boucle de commande. Donc, nous avons pensé que si la poignée permettait d’envoyer un signal de navigation vers l’utilisateur, ce serait bien aussi qu’elle puisse percevoir l’état de cet utilisateur de façon à adapter l’usage du dispositif. Et cela pas seulement au moment du paramétrage initial de l’appareil, mais régulièrement en cours d’utilisation. Exemple : je m’aperçois que la personne commence à fatiguer, il faut peut-être que j’adapte la navigation.” Oui. Mais comment déceler cet état de fatigue ? “En jouant avec le matériau de la poignée. Nous nous sommes dit qu’elle pourrait capter la pression exercée par les mains et ainsi devenir bi-directionnelle pour renvoyer de l’information.”
Un matériau innovant pour activer un courant électrique
C’est ici qu’entrent en jeu le troisième système à l’étude et la troisième équipe Inria impliquée dans le projet : MFX*. “Ils travaillent sur l’impression 3D. Ils ont mis au point un matériau qui peut se compresser pour activer un courant électrique et donc permettre l’exécution d’une commande ou détecter une pression annonçant peut-être un certain niveau de fatigue. Nous faisons actuellement des tests pour voir comment intégrer cette technologie.”
Tout ce travail se déroule “en co-construction avec les utilisateurs, les soignants et les aidants. Il repose sur des itérations permanentes : nous allons sur le terrain. Nous testons. Nous voyons ce qui fonctionne ou pas. Nous récupérons de nouvelles idées. Puis nous retournons au laboratoire pour les implémenter. Nous avons deux partenaires cliniques. Tout d’abord, l’Institut des jeunes aveugles Les Charmettes, à Yzeure, près de Moulins, où nous collaborons avec une instructrice de locomotion qui nous fait remonter beaucoup d’informations. Ensuite, à Rennes, le Pôle Saint-Hélier qui gère un gros centre de médecine physique et de réadaptation ainsi que plusieurs Ehpads. Ils sont très engagés dans ce type d’innovations technologiques.” En tant que dispositif médical, la poignée devra obtenir des certifications spécifiques. “En l’occurrence, notre équipe a construit un savoir-faire dans ce domaine depuis longtemps. Sur ce projet, par exemple, nous avons une ingénieure dédiée à ces aspects réglementaires.”
Premiers déploiements dans plusieurs établissements
Quel avenir ensuite pour cette poignée ? “Habituellement, nous allons jusqu’au prototype pré-industriel. Quand il s’agit d’un système qui vient prendre la main sur l’électronique d’un fauteuil roulant, c’est naturellement à un constructeur d’assurer le relais. Mais sur le dispositif que nous développons cette fois-ci, c’est un peu différent. On peut imaginer d’autres filières de diffusion. Des ergothérapeutes, par exemple, pourraient s’emparer de nos outils. Il nous est arrivé aussi de mettre des fichiers à disposition en open source en collaboration avec l’association My Human Kit, à Rennes. C’est un projet d’ailleurs soutenu par Inria dans le cadre d’une action exploratoire*. Ce mode de diffusion s’inscrit dans l’esprit du rapport DenormandieChevalier remis au gouvernement en 2020 sur la personnalisation des aides techniques aux personnes en situation de handicap et le besoin de favoriser les initiatives venant du terrain.”
À cet égard, les cliniciens sont aussi les premiers vecteurs de diffusion technologique. “Nous avons présenté notre déambulateur durant le congrès de Société française de médecine physique et de réadaptation (Sofmer), en décembre dernier à Rennes. Le CHU de Rennes en construit un actuellement sur la base de notre modèle proposé en open source. Nous prévoyons d’effectuer ensemble un essai clinique. Des discussions commencent également avec le CHU de Brest en lien avec BEaCHILD,” un groupement d’intérêt scientifique centré sur la réadaptation pédiatrique.
Et déjà quelques prototypes commencent à circuler. Ainsi, “au centre pédiatrique Rey Roux, près de Rennes, un jeune homme utilise son déambulateur équipé de notre dispositif depuis plus d’un an. Ce qui a amélioré sa qualité de vie. Avant, il restait assis. Maintenant, il déambule !”
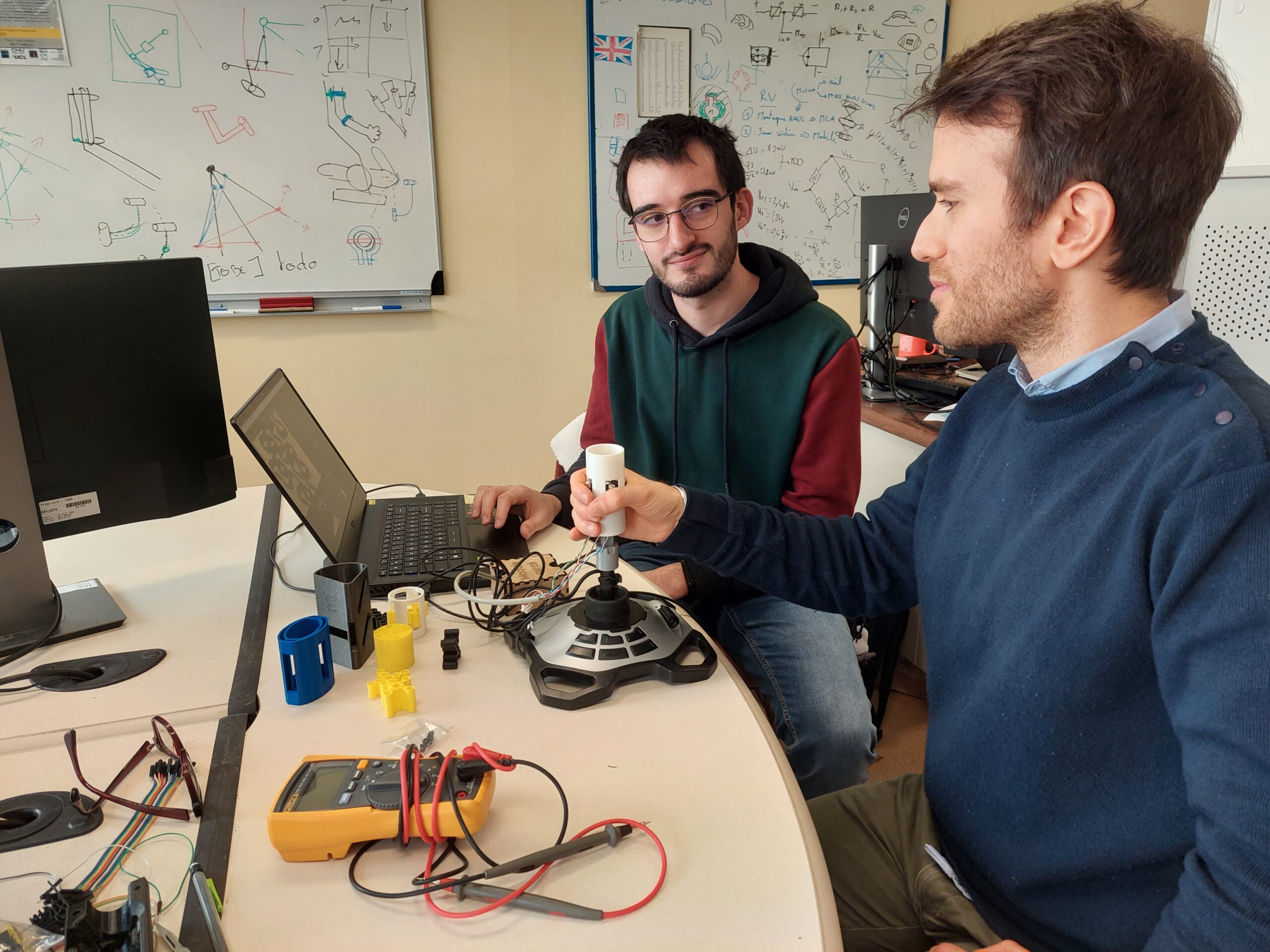 À l’aide de quatre moteurs vibreurs sur un joystick, Pierre-Antoine Cabaret (à gauche) conçoit un système de déplacement dans un dédale. Ici, la vibration indique la direction à prendre. Le joystick servira au pilotage d’un fauteuil électrique. À droite : le chercheur Claudio Pacchierotti. | 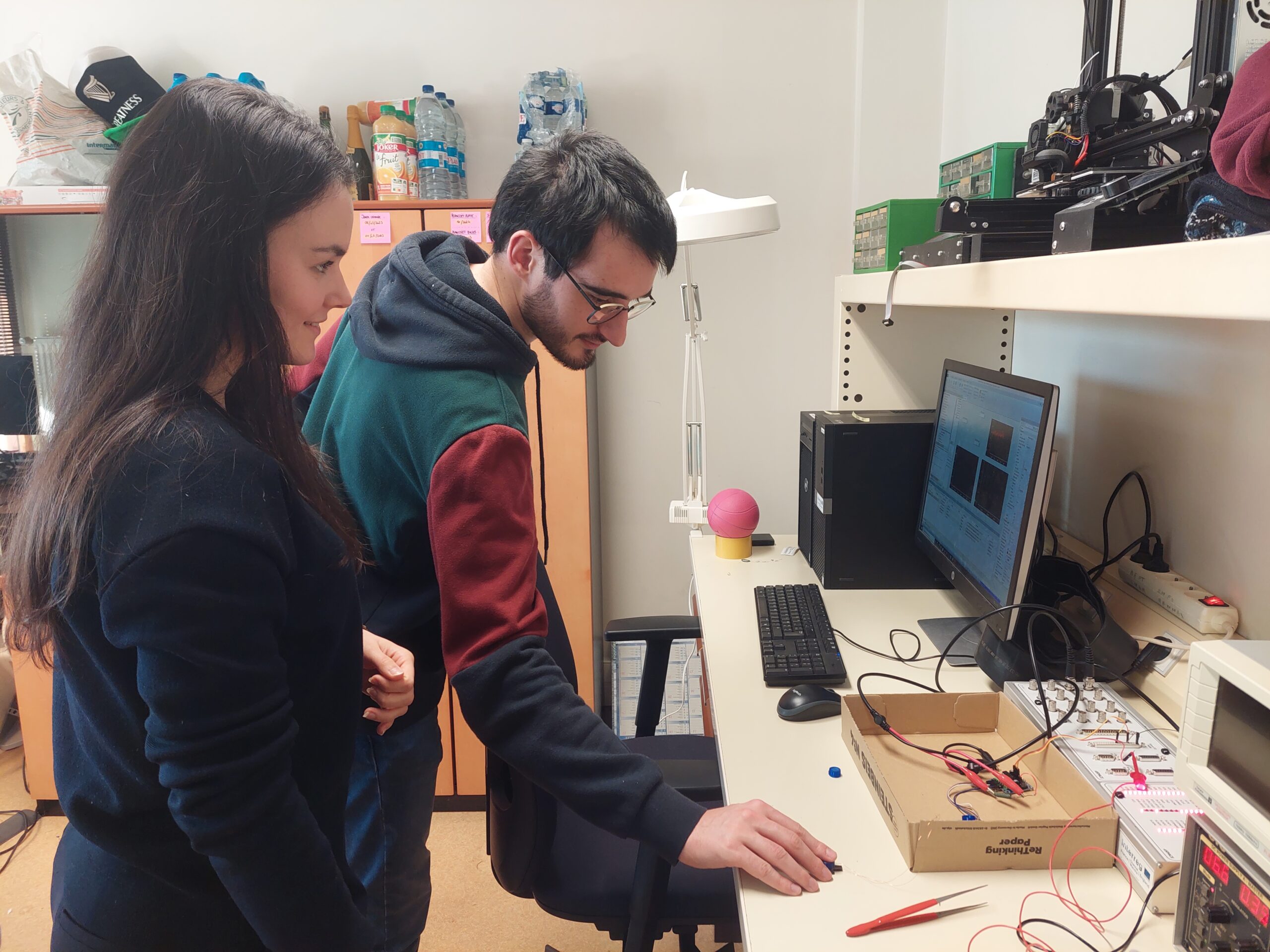 Inès Lacôte élabore un dispositif de vibration qui viendra se placer sous une fine membrane au contact de la peau. Plusieurs vibreurs s’activant l’un après l’autre peuvent indiquer une direction. L’étude d’ergonomie se fait par de multiples essais avec des utilisateurs. |
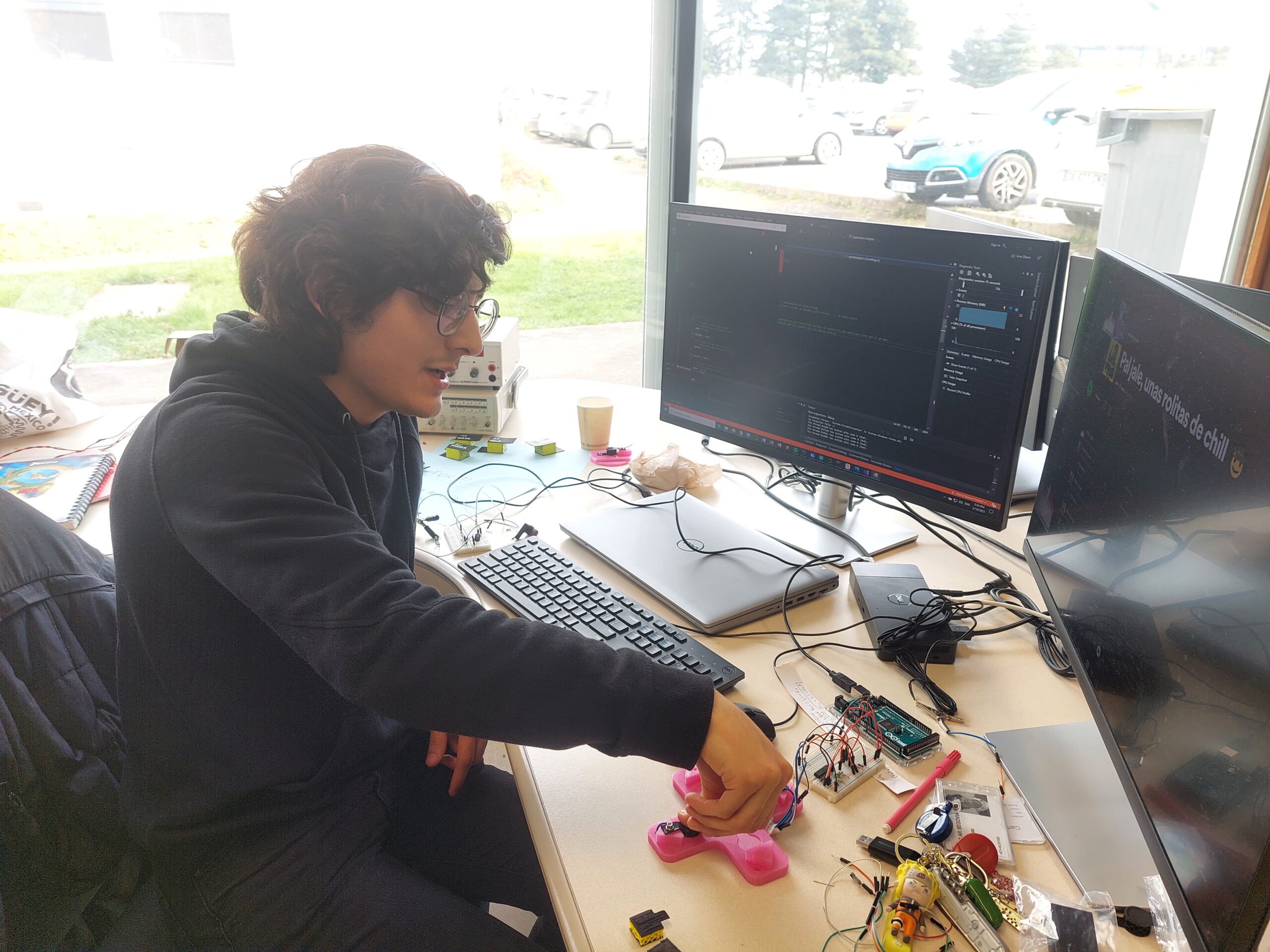 Jose Eduardo Aguilar Segovia étudie l’utilisation d’un matériau conçu en impression 3D par l’équipe MFX. |  Sous la pression du doigt ou de la main, le matériau se déforme jusqu’à permettre le passage d’un courant électrique pouvant servir à l’utilisateur pour actionner une commande. |
|