
(This paper has been published in the workshops of the 2019 Computer Vision and Pattern Recognition Conference.)
Abstract:
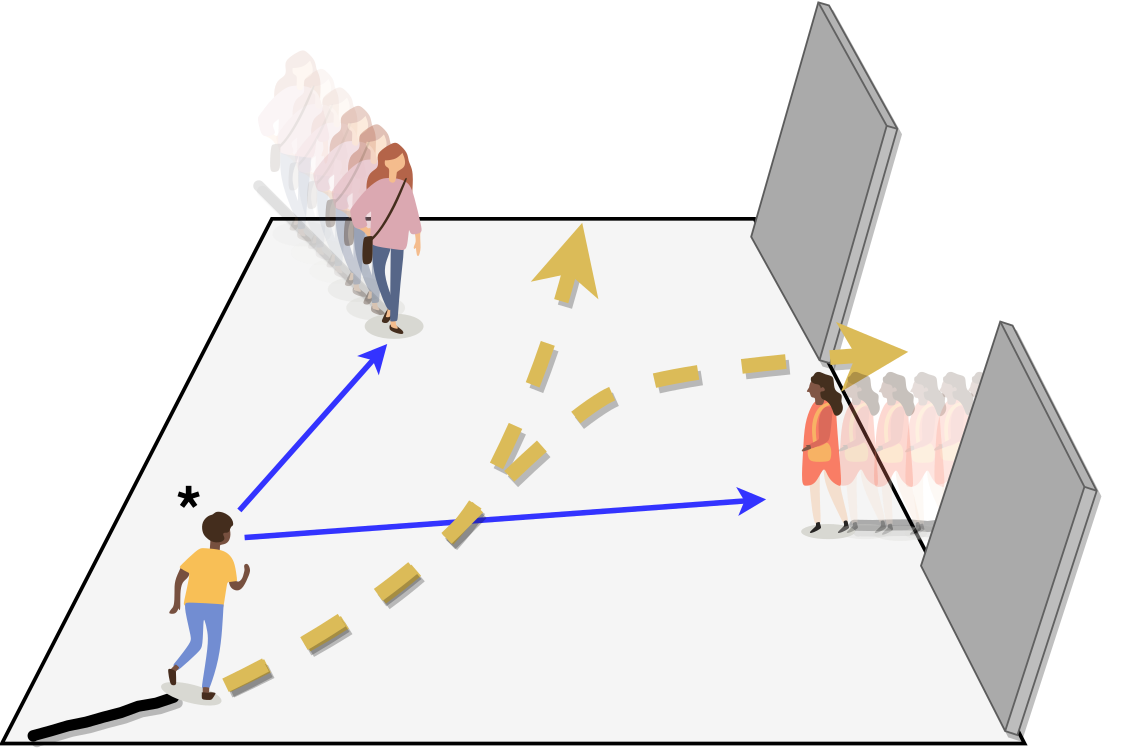
A novel approach for predicting the motion of pedestrians interacting with others. It uses a Generative Adversarial Network (GAN) to sample plausible predictions for any agent in the scene. As GANs are very susceptible to mode collapsing and dropping, we show that the recently proposed Info-GAN allows dramatic improvements in multi-modal pedestrian trajectory prediction to avoid these issues.
Details:
- Title: Social Ways: Learning Multi-Modal Distributions of Pedestrian Trajectories with GANs
- Authors: Javad Amirian, Jean-Bernard Hayet, Julien Pettré
- Download the full article: https://hal.archives-ouvertes.fr/hal-02108756
- The project has a github page as well.