| Planning of Soft-rigid Hybrid Robots Video demonstrating the research of the paper “Planning of soft-rigid Hybrid Arms in Contact with Compliant Environment” presented at RoboSoft 2022. This demo is using SOFA with the SoftRobots.Inverse and ArticulatedSystem plugins. The simulations are available here. |
|
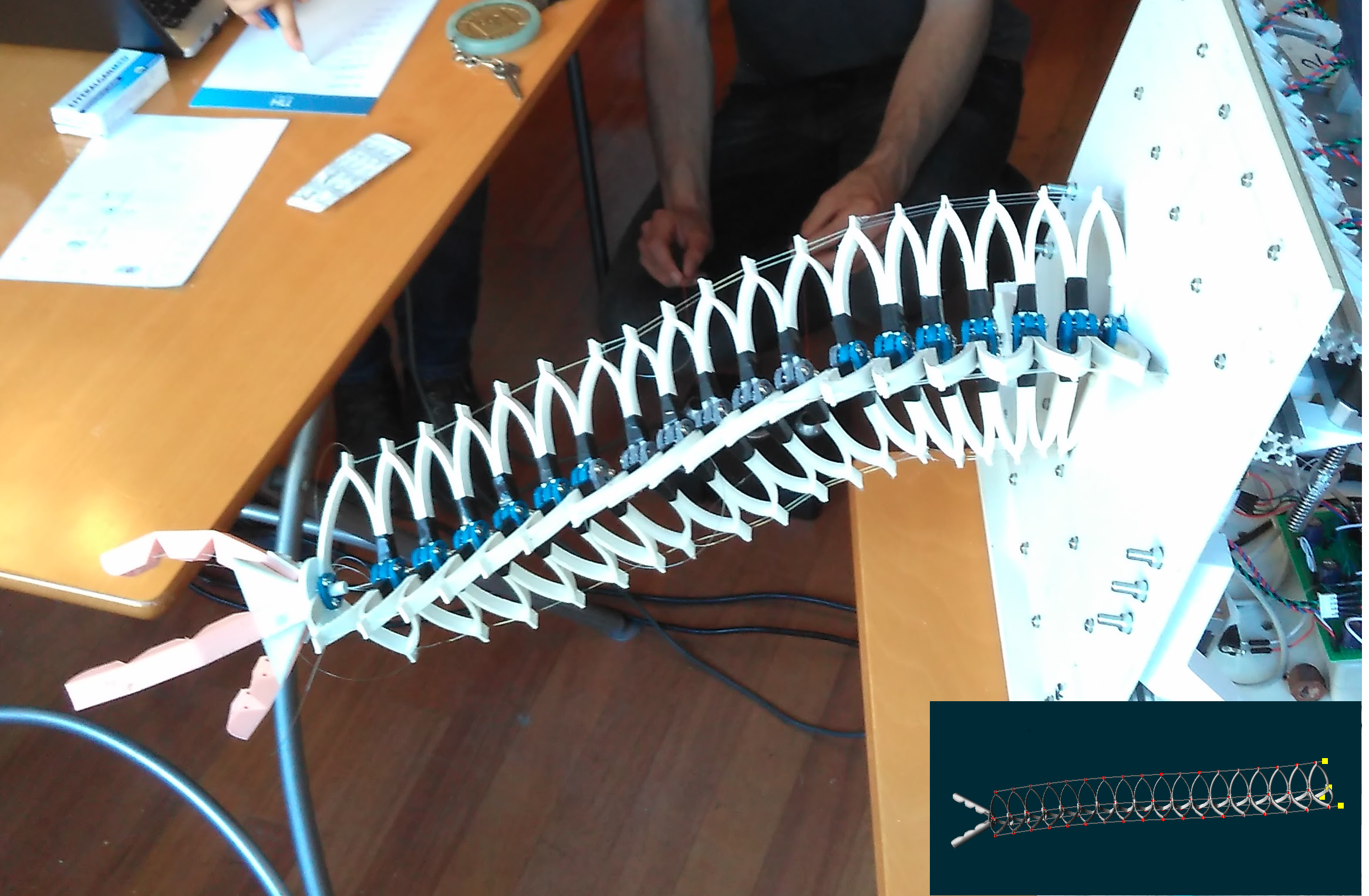
| Anisotropic Soft Robots Video demonstrating the research of the paper “Anisotropic soft robots based on 3D printed meso-structured materials: design, modeling by homogenization and simulation.” presented at ICRA 2020. The SofaHighOrder plugin, distributed with SOFA, contains the components needed to simulate anisotropic material. |
|
| Sensor Video demonstrating the research of the paper “A Model-based Sensor Fusion Approach for Force and Shape Estimation in Soft Robotics” published in IEEE RA-L and presented at IROS 2020. |
|
| Locomotion & Manipulation Video demonstrating the research of the paper “Soft robots locomotion and manipulation control using FEM simulation and quadratic programming” presented at RoboSoft 2019. |
|
| Continuum Manipulator Defrost was part of the RoboSoft Grand Challenge 2018, and received the second place award of the manipulation challenge, for its continuum manipulator. The manipulator motion is controlled through simulation, using the inverse methods available in the SoftRobots.Inverse plugin. |
|
| Real-time Inverse Model with Contact Handling Simulation and motion control of a tendon-driven soft robot interacting with its environment, and with self-collision regions. The trunk-like robot is actuated with eight cables (two sections) and the motion of its tip is interactively controlled using our inverse methods. Related paper: “Optimization-Based Inverse Model of Soft Robots With Contact Handling“ |
|
| SOFIA – SOFt Insect Allterrain SOFIA was designed, using simulation, for the terrestrian race of the RoboSoft Grand Challenge 2016. |
|
 |
Tendon-driven Soft Arm with Gripper This tendon-driven soft arm is actuated with ten strings. We were able to control two positions of the robot (the tip and the middle point) using a gametrak controller and our inverse methods. |
| Cable Actuation – Soft Gripper, Actuator Control (forward model) The soft gripper is a simple grasper made of three deformable fingers. This example is an interactive simulation of the gripper including its interaction with an object and its environment. In this simulation, one can control the grasping actuator and the location of the soft gripper. |
|
| Cable Actuation – Diamond Robot, Effector Control (inverse model) The diamond robot is a robot made of silicone and actuated with four cables. In this simulation, we can interactively control the end-effector (top of the robot) position. The scene can be associated to a real robot through the use of an Arduino board. |
|
| Cable Actuation – Soft Gripper, Effector Control (inverse model) The soft gripper robot is composed of three fingers made of an elastic material and actuated with cables. In this simulation, we demonstrate that it is possible to interactively manipulate the robot by specifying the positions of fingertips. |
|
| Pneumatic & Cable Actuation – Stanford Bunny, Effector Control (inverse model) StanfordBunny simulation with pneumatic and cable actuation. The controlled point on the model is shown by the green square, and its target by the orange sphere. |
|
| Pneumatic Actuation – Pneu Nets, Actuator Control (forward model) In this simulation, we model and simulate the PneuNets Bending Actuators developed by the Whitesides Research Group at Harvard. The pressure in the cavity is interactively set by a user. |




INRIA Lille - DEFROST team